
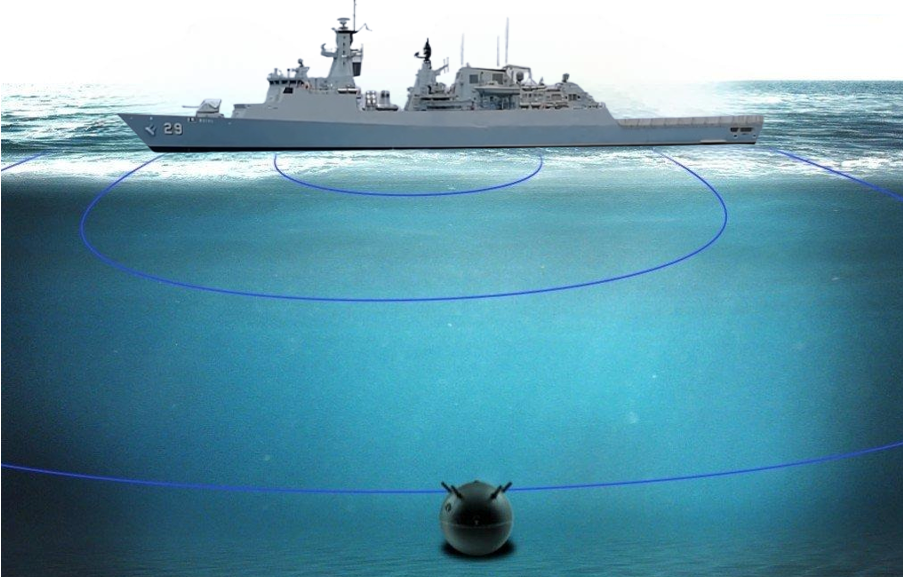
A steel-hulled ship is like a huge floating magnet with a large magnetic field surrounding it. As the ship moves through the water, this field also moves and adds to or subtracts from the Earth’s magnetic field. Because of its distortion effects on the Earth’s magnetic field, the ship can act as a trigger device for magnetic sensitive ordnance or devices which are designed to detect these distortions.
Degaussing is a process in which systems of electrical cables are installed around the circumference of ship’s hull, running from bow to stern on both sides. A measured electrical current is passed through these cables to cancel out the ship’s magnetic field. It could be said that degaussing, correctly done, makes a ship “invisible” to the sensors of magnetic mines, but the ship remains visible to the human eye, radar, and underwater listening devices. The degaussing system is installed aboard ship to reduce the ship’s effect on the Earth’s magnetic field.
In order to accomplish this, the change in the Earth’s field about the ship’s hull is “cancelled” by controlling the electric current flowing through degaussing coils wound in specific locations within the hull. This, in turn, reduces the possibility of detection by these magnetic sensitive ordnance or devices.
The ship’s permanent magnetization is the source of the ship’s permanent magnetic field. The process of building a ship in the Earth’s magnetic field develops a certain amount of permanent magnetism in the ship. The ship’s induced magnetization depends on the strength of the Earth’s magnetic field and on the heading of the ship with respect to the inducing (Earth’s) field

TheMain coil (M)compensates the induced and permanent vertical components of the ship’s magnetic field (Z zone). It is installed in the horizontal plane at the waterline. As the ship changes hemispheres the coil current polarity must be manually adjusted.
TheForecastle permanent –compensate for the longitudinal permanent component of the ship’s magnetic field.
TheAthwartship coil (A)is installed in the vertical plane and extends from the keel to the main deck. It compensates the athwartship induced and athwartship’s permanent components of the ship’s magnetic field. The A coil current consists of permanent and induced components
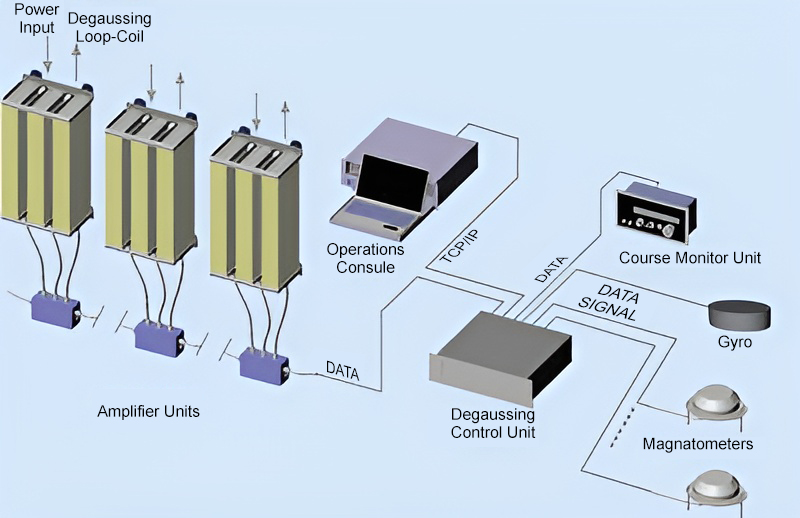
Degaussing System
Modern influence sea mines detect the magnetic disturbance of a vessel in the Earth’s Magnetic Field, this is referred to as the vessels magnetic signature. This Signature is the most significant influences of those used to trigger to the sea mine or TORPEDO.
To minimise this threat naval vessels are fitted with an on-board Degaussing System (DG). The DG reduces the signature with a counter-acting field, generated from a coil system, connected to loop-coil current amplifiers. Typical 90- 95% of the ship’s signature can be neutralised with a well designed 3- dimensional DG system.

Submarine Degaussing System Naval operational priorities have shifted from blue water to brown/shallow water. This means that the threat is increased as ships comes much closer to the influence mines. Better degaussing systems than previously used are therefore now required. The answer to this increased threat is ADG
>Typical degaussing equipment
>Systems suitable for the smallest vessel’s to aircraft carriers
>Turnkey capability including system design, equipment supply and proving trials
>Favorable total ownership cost
>Efficient signature handling with control, evaluation and prediction
>Modular and digital open systems, upgrade-able for future threats
>Cost effective procurement
ADG is normally controlled by one or more magnetometers to achieve a low signature.
Several fallback control modes are available, including Gyro Geomagnetic map and manual, depending on the system layout.
Degaussing Sea-ranging

- Magnetic Sensors: ±100µT, DC-20 Hz optional AC up to 1000 Hz
- Electric Sensors: mHz –3 kHz, ±mV with nV resolution & noise
- Pressure sensors: 0 -65 m, DC –250 Hz
- Acoustic sensor: omnidirectional
- 15 Hz –20 kHz, 143dB rel. 1µV
- Optional 20 Hz -100 kHz
- SWECADE software
- Acoustic waw software
Self Ranging System POLYSERA©
Polyamp Self Ranging System POLYSERA© allow Naval ships to autonomously control of their own underwater signatures- Knowledge of level and range for the underwater signatures is crucial for mission planning and tactical behavior of Naval units
- POLYSERA©is equipped with Magnetic, Electric and Pressure sensors
- POLYSERA©measurement data will show up onboard the ranging vessel using encrypted WLAN data
- POLYSERA©is a truly portable system
Underwater Multi Influence Sensor System

The UMISS© Sea Module is equipped with magnetic, electric and pressure sensors and an optionally acoustic sensor. Underwater signatures are measured for fixed & mobile ranging and surveillance applications such as for harbour protection.
The UMISS© sensor signals measured by the Sea Module sensors are converted to digital signals using a high precision 24Bit ADC. The sensor output data is converted to optical serial data traffic by a media converter and transmitted through an optical cable to the Land Module. The Sea cable carries 2 optical fibres and 2 electrical conductors connecting the UMISS© Sea Module to the Land Module. Alternative data communication with WLAN from a surface bouy or dedicated Ethernet TCP/IP is also available.
Software
The electromagnetic signals from a passing vessel is stored for post analysis in a versatile software tool. The collected data from the sensors can be displayed in a variety of modes with user defined settings. A typical display window provides all the visual information that is needed for analysis and all displays can be stored as pictures for further use in reports or presentations. Integrated FFT analysis provides displays in the frequency range for single sensors or arrays

UMISS© is a family of Multi Influence Sensors Systems designed to measure Underwater Signatures. It consists of parts and subparts that have been proved by use with the fixed and mobile ranges of the Royal Swedish Navy, and has been accepted for International market applications. UMISS© is designed for use as a single unit or with several UMISS© sensors, combined in a full range application.
UMISS© is designed for easy deployment from a small workboat with minimized requirement for diver assistance. The Sea Module is also equipped with 2-axisinclination sensor unit. Data from this unit and the static3-axis magnetic sensor enable compensation for non horizontal positions of the Sea Module to be made during subsequent analysis.
When UMISS© is used as a single unit, a laptop computer and a dedicated program permits real time presentation and storage of the raw sensor data. This stored data is available for later analysis. In a full sea range application PC sensors are connected to a hub and a workstation at the shore range station running the software
